Abstract
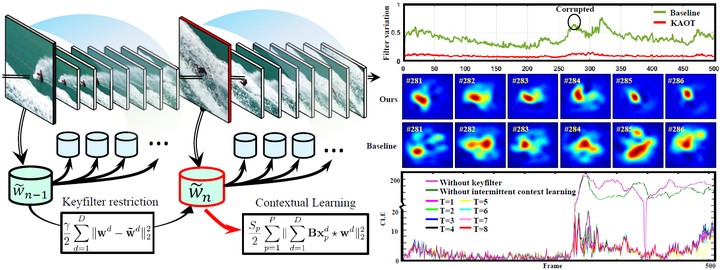
Correlation filter-based tracking has been widely applied in unmanned aerial vehicle (UAV) with high efficiency. However, it has two imperfections, i.e., boundary effect and filter corruption. Several methods enlarging the search area can mitigate boundary effect, yet introducing undesired background distraction. Existing frame-by-frame context learning strategies for repressing background distraction nevertheless lower the tracking speed. Inspired by keyframe-based simultaneous localization and mapping, keyfilter is proposed in visual tracking for the first time, in order to handle the above issues efficiently and effectively. Keyfilters generated by periodically selected keyframes learn the context intermittently and are used to restrain the learning of filters, so that 1) context awareness can be transmitted to all the filters via keyfilter restriction, and 2) filter corruption can be repressed. Compared to the state-of-the-art results, our tracker performs better on two challenging benchmarks, with enough speed for UAV real-time applications.